
SIDE
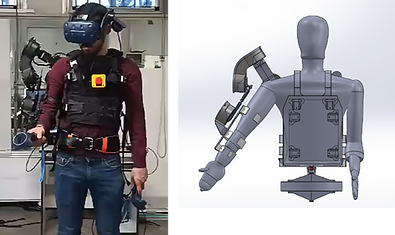
The project aims at the development of an exoskeleton for simulating the dynamics of interaction of humans with virtual reality for training of dangerous settings operators. The wearable robotic system reproduces in real-time the level of torque at the shoulder and elbow joints coupled with the motor task the operator is performing in the VR scenario. The project is funded and in partnership with the Department DIT of INAIL.
Role: PI
In Partnership with: INAIL, Università della Tuscia, Università Niccolò Cusano, Università Federico II di Napoli
Funding: INAIL, BRIC 2019 ID 37
RAISE
Rehabilitation of arm under immersive and simulated environment. The project is focused on the development of a rehabilitation solution for the upper limb in a VR envoronment, leveraging a wearable robotic device for haptic feedback. The creation of serious games capable of delivering simulated dynamic feeling to the patient is expected to enhance effectiveness of the rehabilitation session.
Role: Co-PI
In Partnership with: Università della Tuscia, Università Niccolò Cusano
Funding: REGIONE LAZIO, POR FESR


GURU
Development of a multisensing system based on Mixed reality for the dynamic training of workers in high-risk environments. The project aims at identifying the best feedback solution for delivering VR- or MR-based training for workers involved in high-risk environment. Funded by and in partnership with the Department DIT of INAIL.
Role: Local-PI
In Partnership with: INAIL, DIAG Sapienza Università di Roma, Università Federico II di Napoli
Funding: INAIL, BRIC 2022 ID 46

HERMES
The project aims at testing and optimizing a wearable ankle exoskeleton already designed and validated by the project partners. The project specifically, will tackle the design and validation of an innovative 3-DoF mechanism for the ankle joint of an exoskeleton. The specific design will allow rotations of the ankle in the frontal and transverse planes, while providing assistive torque in the sagittal plane.
Role: PI, Local-PI
In Partnership with: Università della Tuscia, Università Niccolò Cusano
Funding: EUROBENCH Sub-Grant UE, Sapienza University of Rome (Progetti di Ateneo)

PROPRIOCEPTION RESTORING
Developing 3D-printed sensors and machine learning alghoritms for producing smart structures for wearable robotics and implantable bionics. The absence of proprioception in individuals with lower limb amputation is one of the main causes of discomfort and issues related to posture and walking, such as asymmetric gait and excessive metabolic consumption. The purpose of the research is to address this lack by developing a device composed of an elastomeric sensor to measure the load on the prosthetic limb and provide a sensory feedback allowing the patient to 'perceive' their prosthesis, a real-time response that will enable adjusting their posture and gait accordingly.
Role: PI
Funding: Sapienza University of Rome (Progetti di Ateneo)


MOTOR CONTROL IN PARKINSON'S DISEASE
This research project focuses on alteration in posture and balance recovery strategies in perturbed conditions. We are using IMUs to capture total body kinematics of patients while perturbing their balance. The analysis of the postural response is giving insights on different strategies even in early stage patients.
Currently, the project is exploring also muscle synergies and kinematic patterns of PD patients with Freezing of Gait. Patients are under the supervision of Dr. Antonio Suppa and Dr. Marco Paoloni of Sapienza University.
Role: Co-PI
Funding: Sapienza University of Rome (Progetti di Ateneo)
SurTacT - Surgical Tactile Tools
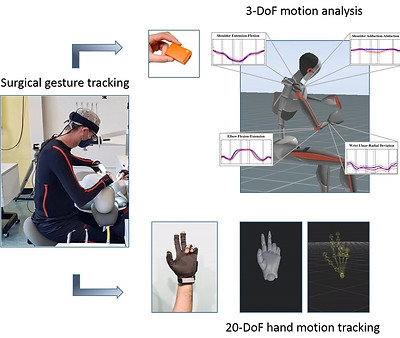
The project aims at developing a new generation of surgical tools for laparoscopy, equipped with tactile sensors and giving a haptic feedback to the surgeon. Specifically, our research group is involved in the biomechanical mapping of surgical gesture for evaluating ergonomics of surgical instruments and exploring the best solution for delivering haptic feedback. The project is funded by the PRIN PNRR 2022 Program, PI: Dr. Guido Gabriele Università di Siena.
Role: Local-PI
In partnership with: Università di Siena, S.S.S. Anna di Pisa, Campus Biomedico University
Funding: MUR – Italian Ministry of University and Research